TL;DR
Researchers at MIT and Stanford built a soft, vine-like robotic gripper that grows from pressurized tubes, coils around targets, then secures and retracts to lift delicate and heavy items. The team demonstrated versions that handle objects from glass vases and watermelons to a system intended to lift a person from a bed.
What happened
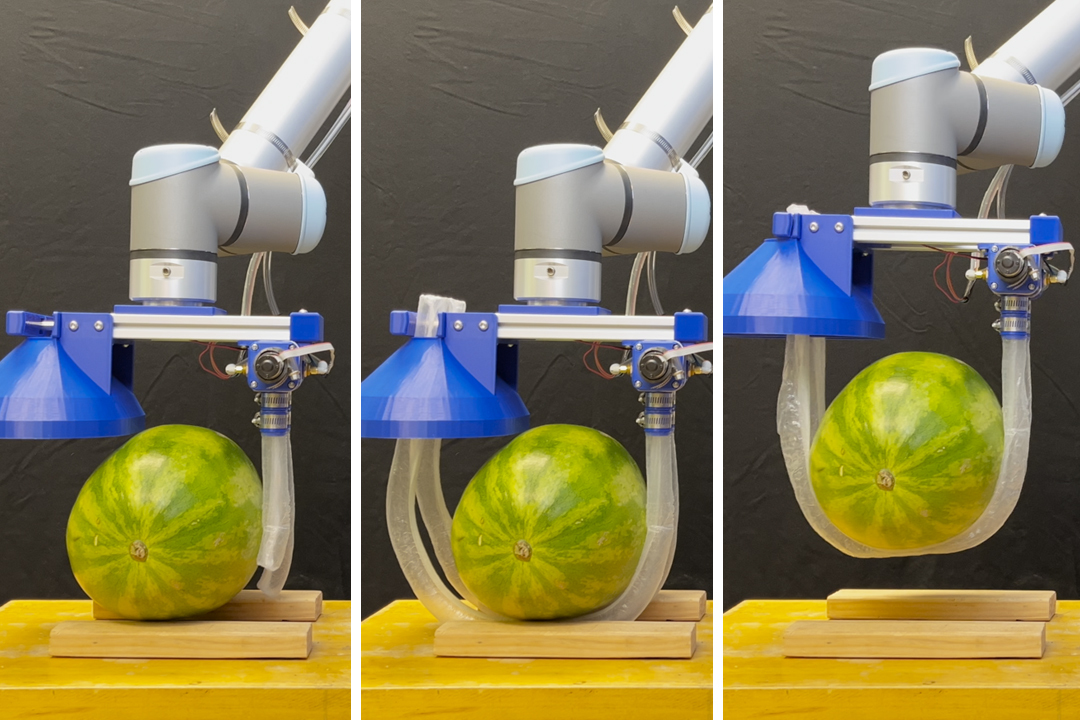
Engineers from MIT and Stanford described a vine-inspired robotic gripper that combines growing, flexible pneumatic tubes with a mechanism that converts an open-ended ‘vine’ into a closed sling. Pressurized boxes deploy thin, inflatable tubes that extend toward a target, twist and coil around it, then continue back to the source where the tube is clamped and wound up by a winch. That loop closure allows the system to lift items in a soft, sling-like grasp. The team built both a small variant that mounts to a commercial robotic arm and a larger overhead system designed to gently lift a person from a bed. In lab demonstrations the vine gripper handled fragile and heavy items — including a glass vase, a watermelon, kettlebell, metal rods, and a playground ball — and was shown to navigate cluttered, confined spaces. The work is reported in Science Advances and lists MIT and Stanford authors including Kentaro Barhydt, O. Godson Osele, Harry Asada, and Allison Okamura.
Why it matters
- Offers a gentler alternative to conventional rigid robotic hands when handling fragile objects.
- Could reduce physical strain on caregivers by automating or assisting patient transfers.
- The vine form factor can reach through cluttered or confined spaces that rigid grippers cannot.
- Design may be applicable across sectors — from agriculture and warehouses to cargo handling — widening robotic grasping options.
- Combines soft-robot safety advantages with the ability to form secure closed-loop grasps.
Key facts
- The gripper is built from thin pneumatic tubes that grow outward from pressurized boxes.
- Open-loop growth lets the vine snake under or around targets; after grasping, it transforms into a closed loop and retracts to lift.
- A smaller prototype was attached to a commercial robotic arm; a larger overhead setup was built to lift a person from a bed.
- Demonstrated objects include a glass vase, a watermelon, a kettlebell, a stack of metal rods, and a playground ball.
- Vines can squeeze through tight quarters and pull objects out of cluttered bins.
- The paper, “Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps,” appears in Science Advances.
- Lead authors include Kentaro Barhydt (MIT) and O. Godson Osele (Stanford); co-authors include Harry Asada and Allison Okamura.
- The project received partial support from the National Science Foundation and the Ford Foundation.
What to watch next
- Progress toward real-world eldercare trials and safety validation for patient transfers — not confirmed in the source.
- Efforts to commercialize or integrate the vine gripper into warehouse/port operations; lab demonstrations exist but deployment timeline is not confirmed in the source.
- Engineering work to scale robustness, control, and user interfaces for caregivers and industrial operators.
Quick glossary
- Pneumatic tube: A flexible tube that inflates and maintains shape when pressurized with air.
- Open-loop (robotics): A configuration that can extend and move without forming a closed connection back to its base.
- Closed-loop (grasping): A configuration where a manipulator secures itself to form a continuous loop that can be retracted to lift or hold an object.
- Winch: A mechanical device that reels in or pays out a rope, cable, or flexible element to apply tension or lift a load.
Reader FAQ
Has this research been published?
Yes. The study appears in the journal Science Advances.
Can the vine gripper lift a person?
The team built a large-scale system designed to lift a person from a bed and demonstrated the concept in the lab.
Is the system ready for clinical use in hospitals or care facilities?
Not confirmed in the source.
Who funded the work?
The project received support in part from the National Science Foundation and the Ford Foundation.
The new design could be adapted to assist the elderly, sort warehouse products, or unload heavy cargo. Watch Video Jennifer Chu | MIT News Publication Date : December 10, 2025…
Sources
- Vine-inspired robotic gripper gently lifts heavy and fragile objects
- MIT and Stanford Engineers Develop Vine-Inspired …
- Soft vine robot wraps fragile items, even lifting human …
- This Vine-Like Grasper Gives Robots a Secure Yet Gentle …
Related posts
- Essential Questions to Ask in Your Next Job Interview — Make the Reverse Interview Count
- Researchers Build MEMS Chip That Keeps Time Nearly as Precisely as Atomic Clocks
- How Engineering Leaders Should Mentor Teams to Boost Innovation in a Digital Age